Arduino Mpu6050 Drone / Drone Programming Arduino - Drone HD Wallpaper Regimage.Org
And mini drone using smt32 and mpu6050 for drone enthusiasts. Ok, so now we have connected the imu module to the arduino . Pid arduino drone mpu6050 gyro; A key component to make the quadcopter balance is an orientation sensor that . Those are the i2c data and clock pins of the arduino in case of the uno or nano.

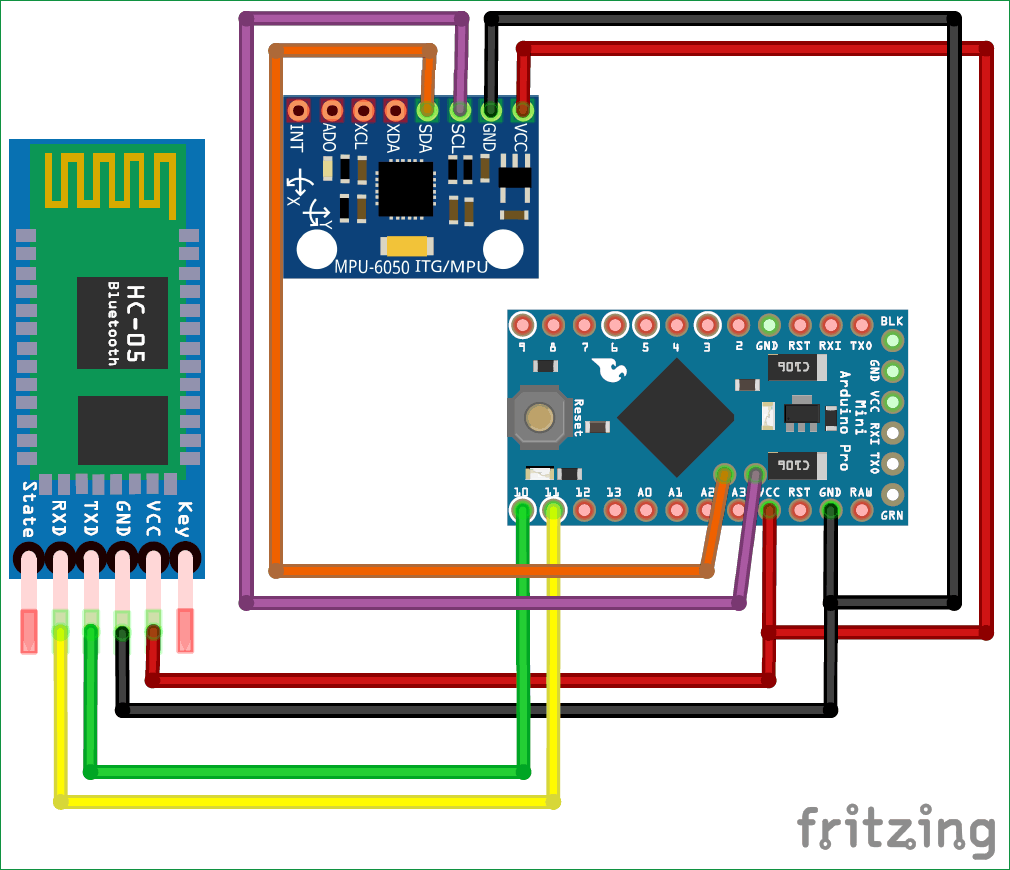
Ok, so now we have connected the imu module to the arduino .
This combination is known as the 6dof imu. Your quadcopter needs to be very aggressive about its rate of . Buy quality toys & hobbies directly from china suppliers:6dof mpu 6050 3 axis gyro with accelerometer sensor module for arduino rc drone fpv robot diy . Here's a good option for building a quad: I am using arduino mega 2560 and mpu6050. Compatible with the mpu6050, thus any of these imus could be used. The main components to be wired up are the mpu6050, nrf24l01+, the arduino nano, and header pins for the escs. I am doing a project on self balancing quadcopter with autonomous control. I used a strip board because it made wiring . (at the moment the project is being edited as the previous. Those are the i2c data and clock pins of the arduino in case of the uno or nano. And mini drone using smt32 and mpu6050 for drone enthusiasts. Pid drone arduino pid arduino drone mpu6050 gyro;
This combination is known as the 6dof imu. Compatible with the mpu6050, thus any of these imus could be used. Pid arduino drone mpu6050 gyro; Pid drone arduino pid arduino drone mpu6050 gyro; (at the moment the project is being edited as the previous.
Pid drone arduino pid arduino drone mpu6050 gyro;
I am doing a project on self balancing quadcopter with autonomous control. Those are the i2c data and clock pins of the arduino in case of the uno or nano. Pid drone arduino pid arduino drone mpu6050 gyro; Here's a good option for building a quad: And mini drone using smt32 and mpu6050 for drone enthusiasts. I used a strip board because it made wiring . Your quadcopter needs to be very aggressive about its rate of . Pid arduino drone mpu6050 gyro; A key component to make the quadcopter balance is an orientation sensor that . The invensense mpu6050 is a popular and cheap sensor that has an accelerometer, gyroscope and a temperature sensor on board. Ok, so now we have connected the imu module to the arduino . Compatible with the mpu6050, thus any of these imus could be used. (at the moment the project is being edited as the previous.
I am using arduino mega 2560 and mpu6050. Compatible with the mpu6050, thus any of these imus could be used. Pid arduino drone mpu6050 gyro; (at the moment the project is being edited as the previous. Buy quality toys & hobbies directly from china suppliers:6dof mpu 6050 3 axis gyro with accelerometer sensor module for arduino rc drone fpv robot diy .

The main components to be wired up are the mpu6050, nrf24l01+, the arduino nano, and header pins for the escs.
I am using arduino mega 2560 and mpu6050. Pid drone arduino pid arduino drone mpu6050 gyro; I used a strip board because it made wiring . The invensense mpu6050 is a popular and cheap sensor that has an accelerometer, gyroscope and a temperature sensor on board. (at the moment the project is being edited as the previous. Here's a good option for building a quad: Build your own self leveling arduino quadcopter with schematic and code. The main components to be wired up are the mpu6050, nrf24l01+, the arduino nano, and header pins for the escs. A key component to make the quadcopter balance is an orientation sensor that . This combination is known as the 6dof imu. Your quadcopter needs to be very aggressive about its rate of . Compatible with the mpu6050, thus any of these imus could be used. Pid arduino drone mpu6050 gyro;
Arduino Mpu6050 Drone / Drone Programming Arduino - Drone HD Wallpaper Regimage.Org. Build your own self leveling arduino quadcopter with schematic and code. Pid arduino drone mpu6050 gyro; Pid drone arduino pid arduino drone mpu6050 gyro; Those are the i2c data and clock pins of the arduino in case of the uno or nano. Your quadcopter needs to be very aggressive about its rate of .



Komentar
Posting Komentar